Ford Kerbspace Hackathon
In our increasingly busy cities, space, parking and air quality are at a premium. Finding the most efficient ways for cars to end their journeys and park has never been more important. It is however, difficult to find out exactly where is free to park at a certain time of day.

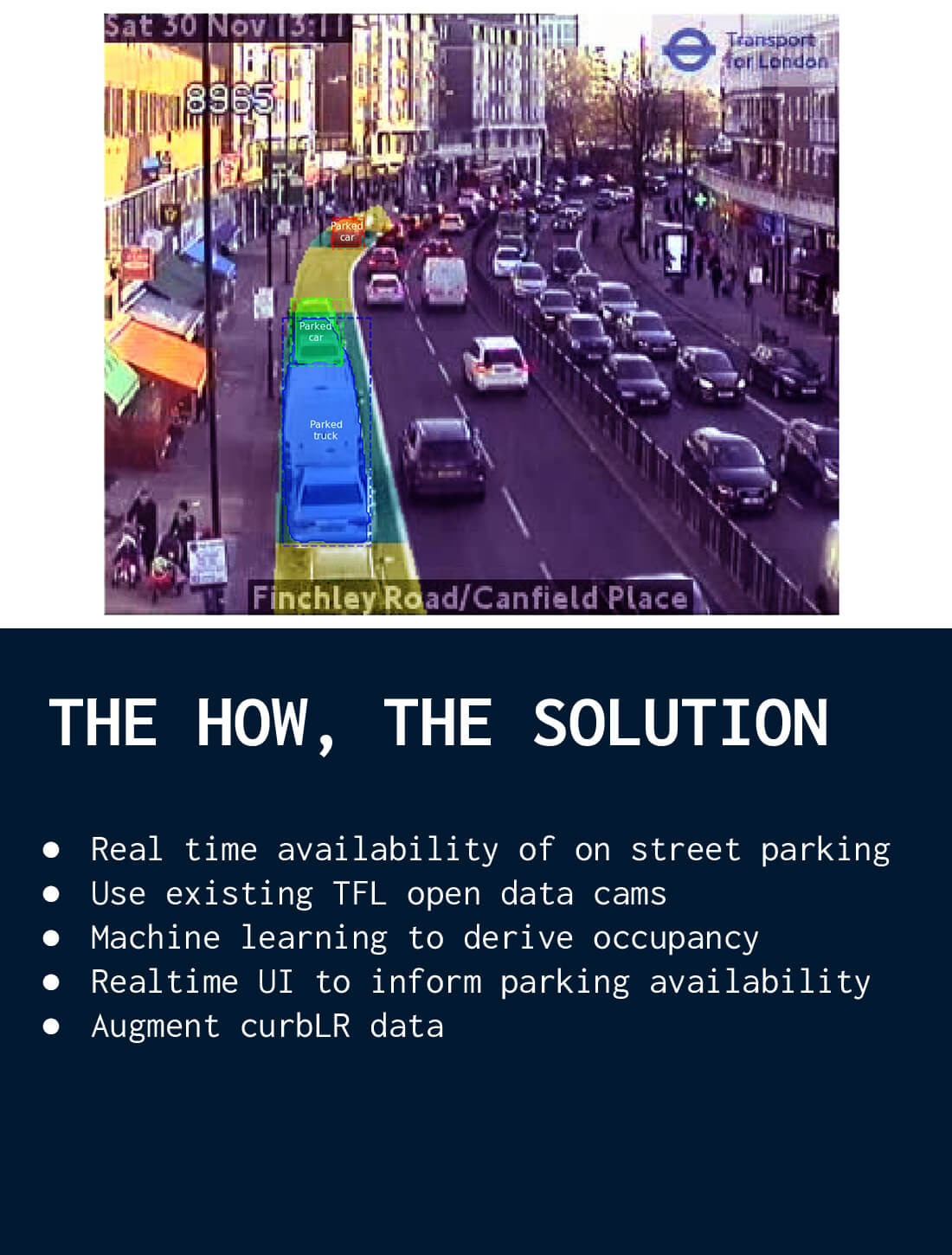
KerbMyRide uses computer vision technology in conjunction with curbLR data and existing live video datasets to infer the real-time availability of on-street parking. We use image classification and derive the occupancy of on street parking bays. This is presented as a realtime user interface, helping drivers make shorter, more efficient journeys and authorities better understand their streets.